En los últimos tiempos, la precisión de las mediciones de altura de las montañas está modificando algunas medidas tradicionales. En este reportaje se explica tanto la historia de las mediciones como el por qué de su exactitud presente.

Los Sostremetries, midiendo en la cumbre del Pico Arnales. Foto: Sostremetries
El pasado mes de octubre publicamos una extensa noticia con las referencias de las nuevas mediciones del Pico de Arnales, en el Balneario de Panticosa.
Se confirmaba, empleando para ello los métodos más modernos y científicos, una altitud de 3001.37 metros, frente a los 2.996m que le atribuía hasta ese momento el Instituto Geográfico Nacional, y pasaba a engrosar la lista de los tresmiles pirenaicos, de donde ha entrado y salido en unas cuantas ocasiones.
Y es que las variaciones en las cotas de las cumbres de las montañas no son algo extraño. En el mismo Pirineo las encontramos no solo en picos secundarios, sino en altitudes tan importantes y consolidadas como el Posets que, en pocos años, ha pasado de sus clásicos 3.375 metros a los 3.369m actuales.
No son grandes variaciones (aunque en algún caso, en montañas secundarias, sí que lo han sido), y no suelen traer polémica, salvo en el caso de que suponga la psicológica diferencia entre ser un dosmil o un tresmil.
La nueva medición supongo investigar desde la misma cumbre, y con los más modernos y mejores sistemas, hasta conseguir su altura lo más exacta posible. Estuvo a cargo de un grupo que se autodenomina Sostremetries, integrado por 5 topógrafos -Andreu Alvarruiz, Oriol Boixareu, Marc Calaff, Salva Sala y David Segura- verdaderamente apasionados y amantes de su profesión, hasta el punto de dedicar su tiempo libre, dinero y esfuerzo a continuar con su labor en mediciones como la del Arnales.
Nos explicaron que estas diferencias vienen dadas tanto por las actuales formas de medición -los sistemas tecnológicos modernos y por satélite son de gran exactitud, frente a los antiguos- como por el uso de los mismos: “Muchas veces, una cumbre se ha medido a través de un vuelo de restitución con un dron, con fotogrametría, etc. Estos sistemas no garantizan que estés midiendo exactamente el punto más alto, y aumentan la incertidumbre. Ocurre que la gran mayoría de las cimas del Pirineo aún no han sido medidas con precisión”.
Esto despertó nuestro interés ¿Cuáles son estos nuevos sistemas de medición de altitudes?¿De dónde proviene su gran exactitud?¿Por qué los sistemas de vuelos o fotogrametría pueden fallar?¿Cuál ha sido la evolución en el tiempo de la medición topográfica de alturas?
Nos dimos cuenta de que es un tema, este de los mapas y cartografías, altitudes, etc, intrínsecamente relacionado con la montaña, y que no solo nos interesaba a nosotros: es una pasión generalmente compartida por quienes aman las alturas. Así que decidimos preguntarles si aceptarían escribir un reportaje en profundidad que diera respuesta a éstas y otras preguntas.
Aceptaron, y aquí tenéis el resultado. Ha sido un arduo trabajo por su parte de concreción y “traducción” comprensible para los profanos de muchos conceptos. Aquí nos ha encantado; ¡esperamos que también a quienes lo leáis!
CÓMO SE MIDEN LAS MONTAÑAS
Un artículo de los Sostremetries para Barrabes
La altitud publicada para la amplia mayoría de cumbres de todo el mundo contiene errores de hasta varios metros.
Prueba de ello es que, en función de la cartografía consultada, la altitud que encontramos para un mismo pico a menudo puede variar entre uno y cinco metros y puntualmente más de veinte. Incluso si nos limitamos a repasar los mapas de una misma editorial, la altitud puede sufrir variaciones a lo largo de sus diferentes ediciones.
¿Pero por qué sucede esto? ¿No se han medido bien?
En este reportaje vamos a explicar quién establece la altitud de las montañas, qué técnicas se suelen utilizar para medirlas, y hasta qué punto son fiables los valores publicados.
Las primeras mediciones. Mont Blanc, Himalaya, Everest. The Great Trigonometric Survey
A la hora de medir la altitud de las montañas, muy lejos en el tiempo han quedado aquellos primeros métodos utilizados a finales del siglo XVIII por el físico, naturalista y geólogo suizo Horace-Bénédict de Saussure.
Hasta entonces, nadie había conseguido hollar el techo de los Alpes y la única manera de medir su altitud era por métodos trigonométricos desde la base. Pero en aquella época las tablas con correcciones de refracción atmosférica todavía no eran suficientemente fiables.
El 3 de agosto de 1787, un año después de la primera ascensión al Mont-Blanc, Saussure fue conducido hasta la cumbre por aquellos mismos pioneros, Michel-Gabriel Paccard y Jacques Balmat, con el objetivo de determinar su altitud. Entre los diferentes instrumentos que cargaron hasta la cima con la ayuda de 18 guías y un mayordomo personal, portaban una versión mejorada del barómetro de mercurio de Torricelli.
La nivelación barométrica de Saussure permitió establecer una nueva altitud del Mont-Blanc de 4775m sobre el nivel del mar, tan sólo 12 metros menor que el valor que obtuvo una década antes Sir George Shuckburgh mediante nivelación trigonométrica desde Ginebra (Kasser 2015).
Sorprendentemente, los valores que obtuvieron tanto Saussure como Shuckburg no quedaron demasiado lejos de los 4807.81 m medidos por la Union Nationale des Géomètres-Experts de Francia el 17 de septiembre de 2021, como parte de su programa bianual de campañas que realizan utilizando receptores GPS profesionales (Géomètres-Experts 2021).

Figura 1. Ilustración de la ascensión de Horace Bénédict de Saussure al Mont Blanc. Fuente: DuBois 1840
Avanzando en el tiempo, debemos hacer una parada a principios del siglo XIX en plenas campañas del Great Trigonometric Survey (GTS), un levantamiento topográfico que estaba llevando a cabo el imperio británico con el objetivo de cartografiar la India. Hasta finales del siglo XVIII, el mundo entero pensaba que la cordillera de los Andes era la más alta del planeta. Sin embargo, esto estaba a punto de cambiar.
Una primera cumbre al oeste de Nepal, conocida localmente como Nanda Devi, con sus 7800 m de altitud, fue la primera en desbancar los Andes como techo del mundo, pero a medida que los cartógrafos avanzaban, irían apareciendo nuevos candidatos. El principal obstáculo era que el gobierno de Katmandú no permitía la entrada de los exploradores a la mayor parte del territorio nepalí y esto les obligaba a proyectar larguísimas visuales desde la frontera. Por ejemplo, unas mediciones preliminares realizadas por William Webb en 1808 ya hacían pensar que el Dhaulagiri sobrepasaba los 8000m, pero con unos ángulos tan cercanos al horizonte, y con demasiada incertidumbre en sus correcciones de refracción atmosférica, no se atrevieron a hacer público el descubrimiento (Keay 2000).
En la Figura 2 se pueden apreciar las largas visuales de más de 150 km que se usaron para triangular la altitud de picos como el Dhaulagiri o el Everest desde la frontera entre la India y Nepal. En cambio, tanto el Nanda Devi como el Kanchenjunga pudieron observarse desde más cerca y consecuentemente con mayor exactitud.

Figura 2. Detalle de la red de triangulación del Gran Levantamiento Trigonométrico de la India 1870
Tras veinte años como superintendente al frente de este enorme proyecto, el topógrafo británico George Everest se retiró en 1843 por problemas de salud y Andrew Scott Waugh asumió el cargo. Cuatro años después, el nuevo superintendente se encontraba al norte de Sonakhoda haciendo mediciones para conectar la cadena de triángulos que transcurre al sur de la cordillera del Himalaya (North East Longitudinal Series) con la que pasa por el meridiano de Calcuta (Calcutta Meridional Series). Mientras Waugh realizaba observaciones desde las colinas de Darjeeling dirigió su teodolito hacia el norte para medir un relativamente cercano Kanchenjunga que se encontraba a tan solo 70 km. Esta nueva medición, más cercana y precisa, le permitió concluir que su altitud debía ser de al menos 8580m, arrebatándole el título al Nanda Devi.
Pero la superioridad del Kanchenjunga también tenía los días contados. En cuestión de menos de tres años, John Armstrong, James Nicholson y el mismo Waugh, cada uno por su lado, realizaron observaciones a la misma cima que asomaba lejos en el horizonte a más de 150 km de distancia. Al verificar que el pico ‘b’ de Armstrong, el ‘h’ de Nicholson y el ‘gamma’ de Waugh eran en realidad una única montaña, pasaron a designarlo como Peak XV (Keay 2000). Sus cálculos preliminares les hacían pensar que el Peak XV podía ser incluso más alto que el Kanchenjunga, pero para confirmarlo necesitarían la ayuda del mejor matemático de la época.
Con tan sólo 18 años, el gran matemático bengalí y experto en trigonometría esférica Radhanath Sikdar entró a formar parte del equipo asumiendo el cargo de Computador para realizar complejos cálculos geodésicos cuando todavía no existían los ordenadores. Veinte años más tarde, en 1849, fue nombrado Computador Jefe y Superintendente del Departamento de Meteorología. Parece ser que Sikdar nunca llegó a participar en las campañas de medición del Everest (Lahiri 2016), pero Waugh confió en sus habilidades como geodesta para revisar los cálculos de la altitud del Peak XV.
Lejos de ser una simple relación trigonométrica, el cálculo de la altitud requirió refinar los coeficientes de refracción atmosférica, aplicar correcciones de marea, realizar ajustes de seis visuales por el método de mínimos cuadrados a mano e incluso tener en cuenta la deflexión de la vertical causada por la sutil atracción gravitatoria del propio Himalaya y de las llanuras del Tíbet que tienen una influencia no despreciable sobre la verticalidad de la plomada en la vertiente sur de la cordillera (Pratt 1855).
El resultado fue un valor redondo de 29000 pies sobre el nivel del mar, pero Waugh decidió añadir un par de pies por temor a que la cifra pareciera un redondeo (Stegman 1982). Antes de sacar a la luz un descubrimiento de semejante envergadura, Waugh decidió guardar el secreto hasta asegurarse de que no hubieran cometido ningún error de cálculo. Cuatro años más tarde, en 1856, anunciaría públicamente la altitud del Peak XV como 29002 pies o 8840 m.
Fue en la misma publicación cuando el mismo Waugh decidió rebautizar nuevamente la montaña, esta vez con el nombre de Everest, en honor a su predecesor en el cargo, a pesar de la oposición del propio George Everest, que era partidario de utilizar la toponimia local. Actualmente la montaña se conoce localmente como Sagarmatha en nepalí o Chomolungma en tibetano. Según Waugh, no fueron capaces de averiguar estos nombres locales ante la imposibilidad de entrar en Nepal (Keay 2000).
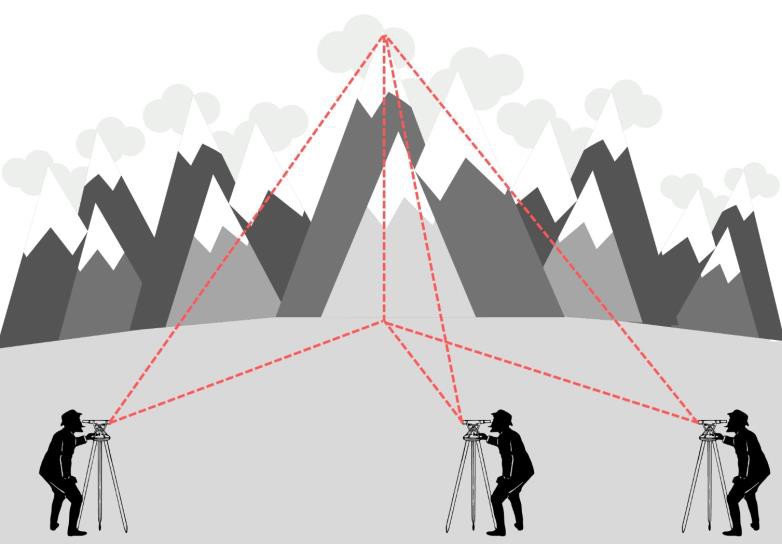 Figura 3. Las primeras mediciones de la altitud de montañas inaccesibles se realizaban mediante triangulación utilizando teodolitos desde al menos dos puntos de coordenadas conocidas. Fuente: Sostremetries 2023
Figura 3. Las primeras mediciones de la altitud de montañas inaccesibles se realizaban mediante triangulación utilizando teodolitos desde al menos dos puntos de coordenadas conocidas. Fuente: Sostremetries 2023
Los 8840m sobre el nivel del mar se mantuvieron como cota oficial del Monte Everest durante prácticamente un siglo, hasta que en el año 1954 un nuevo estudio encabezado por el topógrafo indio Bihari Lal Gulatee elevó la cota de la cima a los 8848m, calculada también por métodos trigonométricos, pero utilizando teodolitos más modernos, cálculos geodésicos más refinados, un geoide mejor modelado, apoyándose en una red de nivelación más precisa y realizando visuales más cortas gracias a la apertura de la frontera nepalí en 1950 (Gulatee 1954).
Las historias sobre las primeras mediciones del Mont Blanc y del Everest nos ilustran la dificultad de determinar la altitud de una cima con precisión. En el resto del artículo presentaremos las técnicas utilizadas hoy en día que, lejos de ser perfectas, permiten calcular altitudes suficientemente buenas como para calmar las necesidades de los excursionistas más exigentes.
Los vuelos fotogramétricos
Con el siglo XX y los primeros vuelos a motor llegó la era de la fotogrametría aérea, y ésta sigue siendo hoy en día la técnica que se utiliza para calcular la altitud de prácticamente todas las montañas del planeta.
Esta técnica consiste en hacer mapas a partir de fotografías que se toman desde cualquier tipo de aeronave. El principio fundamental es el hecho de que, a partir de dos o más fotografías de un mismo objeto, pero tomadas desde puntos de vista ligeramente diferentes, se puede calcular la distancia entre la cámara y dicho objeto. Este concepto se conoce como paralaje y es el mismo principio que permite que los animales con visión binocular seamos capaces de calcular distancias cercanas con precisión. El paralaje también se utiliza por ejemplo para calcular la distancia hasta las estrellas más cercanas aprovechando que la Tierra cambia, relativamente poco, su punto de vista a lo largo del año.
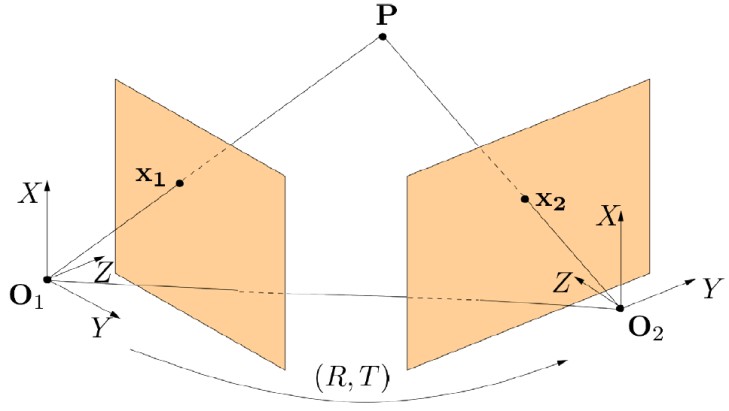 Figura 4. Concepto de paralaje. La visión de un mismo objeto desde dos puntos de vista diferentes permite determinar la profundidad. Fuente: Kleinsteuber 2014
Figura 4. Concepto de paralaje. La visión de un mismo objeto desde dos puntos de vista diferentes permite determinar la profundidad. Fuente: Kleinsteuber 2014
El primer paso consiste en sobrevolar el territorio mientras se toman fotografías con una cámara de muy alta resolución. Al volver a tierra, las imágenes se descargan y se calibran para reducir las distorsiones inherentes a la óptica. El siguiente paso consiste en identificar en esas imágenes un puñado de elementos del terreno de coordenadas previamente conocidas. Luego, un complejo proceso de ajuste que tiene en cuenta las coordenadas de dichos elementos, la posición relativa entre imágenes y la trayectoria del avión permitirá determinar al decímetro la posición y orientación de la cámara en el instante de cada captura.
Con toda esta información se da paso a la denominada restitución fotogramétrica, que permite triangular coordenadas para casi cualquier otro punto del terreno, entre ellos los puntos culminantes de las montañas.
Este último paso sigue siendo hoy en día un proceso bastante manual. Concretamente es un operador experto el que, mediante visión estereoscópica (i.e. visión 3D), posiciona el cursor sobre el elemento que le parece visualmente más elevado.
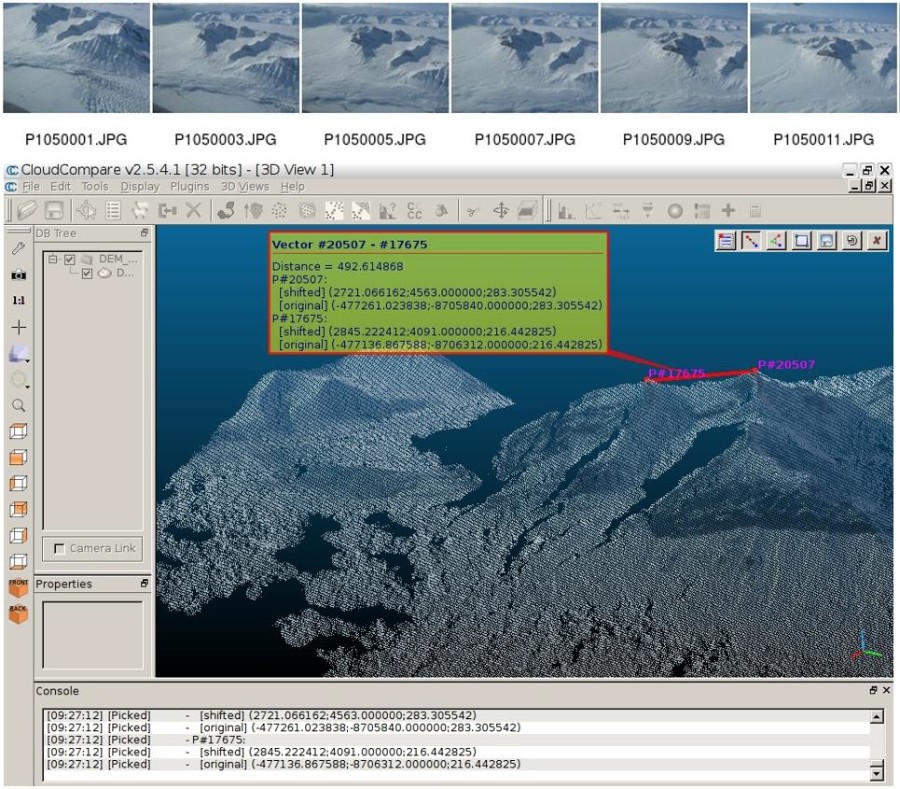 Figura 5. Midiendo la distancia entre dos cimas en el Parque Nacional de Nordre Isfjorden, Svalbard. La nube de puntos se ha generado por métodos fotogramétricos a partir de imágenes aéreas. Fuente: Friedt 2014
Figura 5. Midiendo la distancia entre dos cimas en el Parque Nacional de Nordre Isfjorden, Svalbard. La nube de puntos se ha generado por métodos fotogramétricos a partir de imágenes aéreas. Fuente: Friedt 2014
La exactitud ha ido mejorando con los años. A mediados del siglo XX la exactitud en cota de los puntos triangulados era de unos 2m (Aguilar et al. 2013) y actualmente se encuentra alrededor de los 15cm (IGN 2021).
Esta mejora es fruto de múltiples avances tecnológicos que han permitido realizar vuelos a menor altura, disponer de cámaras métricas de mayor resolución, una georeferenciación más precisa gracias a la reobservación de redes geodésicas y de nivelación, algoritmos automáticos de correlación entre imágenes, etc.
Pero, aunque hoy en día los puntos triangulados sean muy precisos, a menudo es muy difícil o imposible identificar la piedra más alta sobre fotografías tomadas desde tan lejos y la altitud asignada a la cumbre puede tener errores superiores a un metro (ICGC 2011). Evidentemente, en cimas que están cubiertas por bosque, los errores serán todavía mayores porque el operador no ve a través de los árboles y se verá obligado a estimar su altura.
La gran eficiencia de los vuelos fotogramétricos para cubrir mucho territorio en pocas horas compensa con creces estas limitaciones y hace que la fotogrametría aérea siga siendo hoy en día la técnica casi universal para medir la altitud de las montañas.
Pero todavía hay técnicas que ofrecen mayor precisión.
Nubes de puntos LIDAR
El LiDAR (Light Detection And Ranging) es un instrumento que mide la distancia a la que se encuentran los objetos que tiene a su alrededor. El emisor envía continuamente pulsos de luz que rebotan sobre los objetos y, al regresar, el sensor cronometra el tiempo que han tardado en hacer el viaje de ida y vuelta. Como la velocidad del pulso es conocida, esto permite calcular la distancia hasta el objeto.
Esta tecnología se desarrolló a principios de los años 60 y actualmente tiene múltiples aplicaciones, entre ellas la creación de modelos tridimensionales que se utilizan por ejemplo para la detección de obstáculos en la conducción automatizada de coches. Pero si este mismo sensor se sube a bordo de una avioneta y se apunta hacia el suelo, evidentemente con el fuselaje perforado, esto permite calcular la altura del terreno.
Desde principios de siglo, algunas empresas y agencias de cartografía utilizan un LiDAR para generar modelos de alturas del terreno. Por ejemplo, el Instituto Geográfico Nacional (IGN) distribuye a través de su portal de descargas una nube de puntos LiDAR desde 2008, tanto la nube original, como versiones interpoladas en forma de malla regular (CNIG 2023).
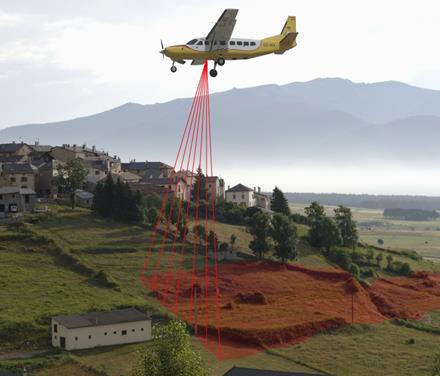 Figura 6. Simulación de la captura de nube de puntos LiDAR utilizando un sensor aerotransportado. Fuente: ICGC
Figura 6. Simulación de la captura de nube de puntos LiDAR utilizando un sensor aerotransportado. Fuente: ICGC
La densidad máxima de la nube de puntos dependerá de la altura de vuelo, la velocidad mínima del avión, el solapamiento entre pasadas y de la rapidez con la que el sensor es capaz de procesar la información que le llega, pero grosso modo es del orden de un punto por metro cuadrado (IGN 2019). Cada punto se almacena en un registro junto con sus coordenadas, el ángulo de incidencia, intensidad de retorno, número de objetos en los que ha rebotado, etc. Incluso a veces se combina con una cámara fotogramétrica para guardar el color del suelo en dicho punto. Aunque esto pudiera parecer poca cosa, suponiendo que la información de cada punto requiera unos 300 bits (OGC 2018), en una extensión como la del Pirineo central entre el Balaitús y la Pica d’Estats, se obtendrían alrededor de tres mil millones de puntos y esto requeriría unos 100 GB de RAM para visualizar o trabajar con todo el conjunto a la vez (Isenburg 2017).
Hoy en día pocos ordenadores serían capaces de cargar esta nube entera en memoria y algunos procesos con tantos puntos tardarían semanas o meses. Tal cantidad de información dificulta trabajar con la nube de puntos original y la mayoría de los usuarios opta por utilizar la versión en forma de malla regular. La malla contiene mucha menos información que la nube original, pero se puede visualizar con cualquier sistema de información geográfica y muy poca memoria.
Gracias a un proceso de calibración y ajuste entre pasadas, los puntos capturados mediante LiDAR aerotransportado típicamente alcanzan precisiones en cota entre 5 y 30 cm según varios factores (ASPRS 2013). Pero la limitación principal a la hora de determinar la altitud de las montañas es similar a la de la fotogrametría en el sentido de que probablemente no tendremos una medición exactamente en el punto más alto. El caso extremo son las típicas crestas de bloques de granito con agujas afiladas donde apenas cabe una persona. Incluso con un punto por metro cuadrado sería muy improbable que uno de ellos hubiera rebotado justo en el vértice más prominente de la roca más alta.
Pero el LiDAR esconde un as bajo la manga. Su gran ventaja es que los haces casi siempre serán capaces de penetrar a través de la vegetación, y al menos una parte de la señal retornará al sensor (Isenburg 2017). Esta característica le da una clara ventaja respecto a la fotogrametría sobre todo en cimas cubiertas por bosques densos. Sólo que un puñado de puntos llegue hasta el suelo será suficiente para estimar la altura de los árboles.
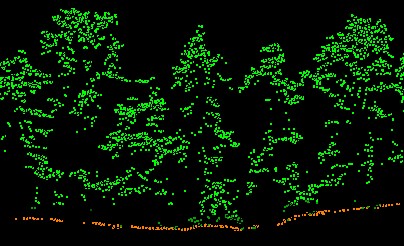 Figura 7. Perfil de una nube de puntos LiDAR clasificada que permite distinguir claramente la vegetación (verde) y el suelo (naranja). Fuente: Just 2019
Figura 7. Perfil de una nube de puntos LiDAR clasificada que permite distinguir claramente la vegetación (verde) y el suelo (naranja). Fuente: Just 2019
Probablemente, en la próxima década veremos que gracias a los vuelos LiDAR de mayor densidad, las mejoras en algoritmos de proceso y unas máquinas capaces de procesar más rápido será posible calcular automáticamente la altitud de todas las montañas sin necesidad de que una persona tenga que determinar el punto más alto por fotointerpretación.
Un LiDAR de alta densidad ofrecería sin duda la solución más precisa de medir la altitud de una montaña… desde el aire, pero si tenemos la oportunidad de subir a la cima, podemos ir más allá.
Receptores GPS
Técnicamente conocidos como receptores GNSS, estos aparatos reciben señales que provienen de una o varias constelaciones de satélites y las utilizan para determinar nuestras coordenadas sobre el globo.
La primera constelación en ponerse en órbita fue la Global Positioning System (GPS), creada por el departamento de defensa de Estados Unidos (DoD) a finales de los años 70 e inicialmente restringida al uso militar. Pocos años después, la antigua Unión Soviética lanzó su propia constelación, llamada GLONASS, muy similar en características a la norteamericana. Pero como acostumbra a pasar a menudo, el primero en llegar es el que bautiza y por este motivo los receptores se conocen como GPS y no como GLONASS.
No fue hasta principios del siglo XXI en que China (Xinhua 2020), la Unión Europea (EC 2016), Japón (CAO 2023) e India (URRao 2019) pusieron en órbita sus propias constelaciones, Galileo, BeiDou, QZSS y IRNSS respectivamente.
El conjunto de todas estas constelaciones es el sistema conocido como Global Navigation Satellite System (GNSS).
¿Cómo funciona un GPS?
Los receptores GPS determinan su posición a partir de la información que reciben de las constelaciones que acabamos de describir. Cada satélite emite continuamente su posición y la hora de emisión. Mientras tanto, los receptores únicamente se dedican a “escuchar y calcular”. El satélite no le dice al receptor dónde se encuentra, simplemente le dice “he enviado una señal a esta hora y desde esta posición”. Con tan sólo estos dos datos, el receptor es capaz de calcular la distancia a la que se encuentra de ese satélite.
Conociendo la distancia a un satélite, el receptor “sabe” que puede estar en cualquier punto de la superficie de una esfera imaginaria centrada en dicho satélite. Si el receptor recibe señales de un segundo satélite, esto le permite restringir su posición a cualquier punto de la circunferencia definida por la intersección entre las esferas imaginarias de cada uno. Captar un tercer satélite permitiría limitar la posición a sólo dos puntos (la intersección de la circunferencia anterior con la tercera esfera imaginaria), pero uno de estos puntos se puede descartar porque típicamente estará situado demasiado lejos de la superficie terrestre. Esto nos deja un único punto posible.
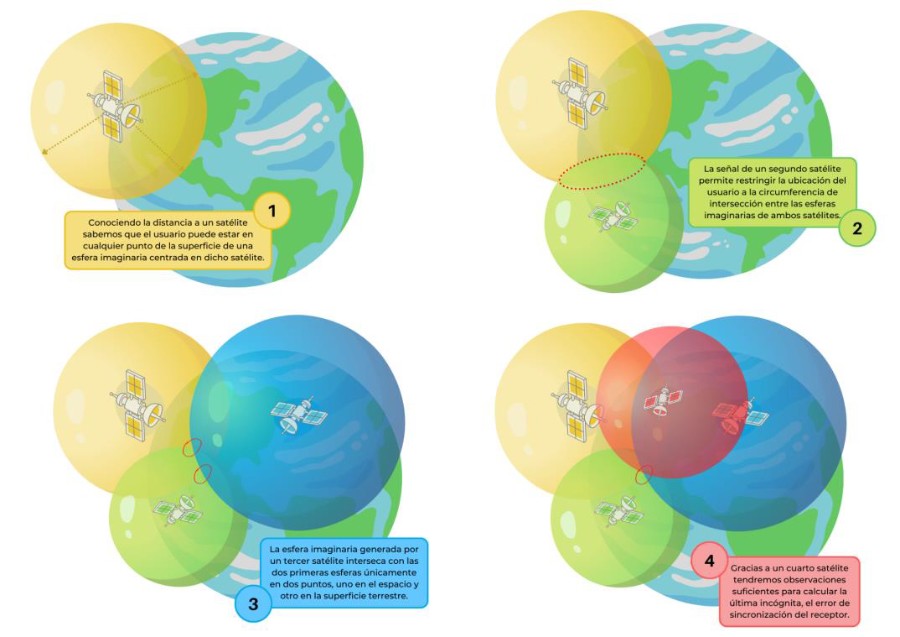 Figura 8. Principio de funcionamiento del GPS. La posición del receptor se calcula por multilateración a partir de la distancia a al menos cuatro satélites. Fuente: Sostremetries 2023
Figura 8. Principio de funcionamiento del GPS. La posición del receptor se calcula por multilateración a partir de la distancia a al menos cuatro satélites. Fuente: Sostremetries 2023
La determinación de coordenadas a partir de distancias a varios puntos de coordenadas conocidas se conoce como multilateración y consiste en resolver un sistema de ecuaciones que contiene una ecuación por cada satélite.
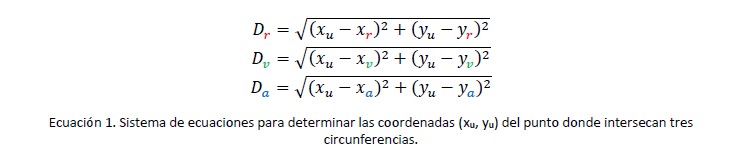
Este concepto es mucho más fácil de imaginar mediante una simplificación del problema en dos dimensiones. Supongamos que un receptor ha medido la distancia a los tres satélites de la Figura 9. La distancia a cada uno limita su posición a la circunferencia correspondiente y, por lo tanto, el receptor se halla en el único punto donde intersecan las tres circunferencias.
 Figura 9. Simplificación bidimensional de la trilateración a partir de tres satélites. Fuente: Sostremetries 2023
Figura 9. Simplificación bidimensional de la trilateración a partir de tres satélites. Fuente: Sostremetries 2023
Numéricamente encontrar el punto de intersección es equivalente a resolver un sistema de ecuaciones como el de la Ecuación 1. Las distancias a los satélites rojo, verde y azul son Dr, Dv, Da, respectivamente. Las coordenadas x, y de cada satélite utilizan la misma nomenclatura que las distancias. Finalmente, xu e yu son las coordenadas del punto de intersección, las incógnitas del sistema.
 Probablemente, más de un lector a estas alturas ya se ha percatado de que la Ecuación 1 es un sistema sobredeterminado que en general no tiene solución (y sin duda más de un lector se ha horrorizado al ver tanta ecuación en un artículo de montaña). Es precisamente este exceso de ecuaciones la clave para el éxito.
Probablemente, más de un lector a estas alturas ya se ha percatado de que la Ecuación 1 es un sistema sobredeterminado que en general no tiene solución (y sin duda más de un lector se ha horrorizado al ver tanta ecuación en un artículo de montaña). Es precisamente este exceso de ecuaciones la clave para el éxito.
En un mundo perfecto donde las observaciones de distancia y tiempo fueran infinitamente precisas ya habríamos terminado y tendríamos nuestra posición exacta, pero en el mundo real cualquier observación tiene un error. En este caso estamos midiendo una distancia en base al tiempo que tarda una señal que viaja casi a la velocidad de la luz en recorrer una distancia relativamente corta, poco más de 20000 km. Es decir, tenemos que cronometrar una carrera que en total dura menos de una décima de segundo y asumir que si cometiéramos un error de tan solo una milésima de segundo, el error en nuestra posición sería de 300 km. Claramente insuficiente para calcular la altitud de una montaña.
Como hoy en día un reloj atómico supera el presupuesto de cualquier excursionista (al menos uno que nos quepa en la mochila), la alternativa es utilizar más satélites. Recibiendo señales de cuatro satélites tendremos observaciones suficientes para resolver las cuatro incógnitas del sistema (las coordenadas x, y, z y el error de sincronización del receptor). Cuatro satélites es el mínimo
imprescindible, pero a partir de aquí cuantos más recibamos más esferas imaginarias podremos añadir al sistema de ecuaciones y más precisa será nuestra posición.
Volviendo al símil bidimensional, añadir el error inherente a la observación de distancia equivaldría a convertir las circunferencias en anillos con un cierto grosor como los de la Figura 10. El área de la intersección entre anillos (la zona donde se superponen los tres colores) es un reflejo de la incertidumbre de nuestra localización.
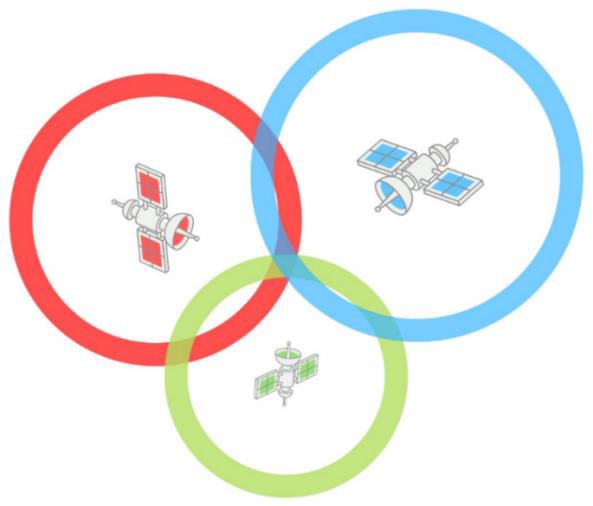 Figura 10. Si introducimos cierto error en el cálculo de las distancias, la intersección pasa a tener una cierta extensión. Fuente: Sostremetries 2023
Figura 10. Si introducimos cierto error en el cálculo de las distancias, la intersección pasa a tener una cierta extensión. Fuente: Sostremetries 2023
¿Qué precisión se puede obtener?
Para responder esta pregunta hay que distinguir entre dos tipos de receptores muy diferentes. Los de ocio y los profesionales.
Los receptores de ocio tienen una precisión máxima de entre 3 y 5 metros en condiciones óptimas de constelación y siempre que no haya edificios, árboles o montañas que oculten parcialmente la bóveda celeste (van Diggelen y Enge 2014). Los encontramos en teléfonos móviles, relojes deportivos y navegadores (tanto los de coche como los de excursionismo) y su precisión está limitada por el tipo de señal que son capaces de procesar, típicamente están restringidos a utilizar el código C/A (coarse acquisition code) cuyos bits tienen una longitud de 300 metros. La longitud de los bits determina la precisión teórica máxima alcanzable, aproximadamente un 1% del tamaño de cada bit, es decir 3 metros (van Diggelen y Enge 2014).
El inconveniente de usar un receptor de ocio para medir la altitud de las montañas es que la precisión es del mismo orden de la que se consigue por fotogrametría o incluso peor. A los receptores de ocio se les llama también navegadores porque su función es guiar al usuario y por lo tanto este rango de precisiones es más que suficiente para dar indicaciones. La única manera de mejorar la precisión sería promediando varias lecturas, pero si todas ellas se realizan en las mismas condiciones la exactitud global no mejorará en absoluto.
Así que solo podremos mejorar esa exactitud es espaciando las lecturas al menos cuatro horas entre ellas para que la constelación de satélites varíe y combinando al menos tres receptores diferentes. Después de dos semanas de duro trabajo subiendo a la misma cima al menos un par de veces cada día, en el mejor de los casos habremos conseguido determinar la altitud con un margen de error de un metro. Eso sí, estaremos en mejor forma física.
Una alternativa es utilizar un receptor profesional. Con estos dispositivos se pueden obtener precisiones que van desde el medio metro hasta unos pocos milímetros (Perosanz 2019), en función del tipo concreto de receptor, del tiempo de observación y de qué datos se aprovechan y cómo se procesan.
Pero este segundo tipo de receptores merece su propio apartado en este reportaje porque es, con diferencia, la manera más precisa de medir la altitud de una montaña.
Medir montañas con precisión centimétrica
La principal característica que distingue un receptor GPS profesional de los de ocio es el tipo de antena que llevan. En general la antena suele ser multifrecuencia, multiconstelación, con mayor sensibilidad y capaz de filtrar mejor la señal. Se distinguen a simple vista porque suelen venir en el interior de una carcasa en forma de disco de un palmo de diámetro y se suelen colocar en el extremo de un jalón largo (ver Figura 11).
Además, los receptores profesionales son capaces de “escuchar” la señal portadora original, una onda sinusoidal (sin modular) de frecuencia mucho mayor que el código C/A y consecuentemente con una longitud de onda mucho más corta, de unos 20 cm (van Diggelen y Enge 2014). Esto proporciona una resolución que es tres órdenes de magnitud superior a la de los bits de 300 m del código C/A.
Pero la cosa no acaba aquí: el receptor además es capaz de fijarse en el desfase angular dentro del ciclo. Suponiendo que pueda calcular correctamente el número de ciclos enteros que han transcurrido desde que se envió la señal y sumar la fracción del último ciclo, el resultado será una medición de la distancia hasta el satélite con precisión centimétrica.
 Figura 11. Receptor GPS profesional. El disco que hay sobre el extremo superior del jalón es la antena. Fuente: Sostremetries 2022
Figura 11. Receptor GPS profesional. El disco que hay sobre el extremo superior del jalón es la antena. Fuente: Sostremetries 2022
Otra mejora sustancial de la precisión se consigue gracias a la técnica GNSS diferencial que consiste en utilizar dos receptores simultáneamente. Uno de ellos se coloca sobre el punto que queremos medir y el otro sobre un punto cercano de coordenadas conocidas (por ejemplo, un vértice geodésico). Si los receptores están relativamente cerca entre ellos (a pocos kilómetros), podemos asumir que ambos estarán observando los mismos satélites y los errores de propagación de la señal a través de la ionosfera serán muy similares. Esto es una información privilegiada. Al conocer las coordenadas “exactas” de uno de los receptores, podremos estimar el error en un momento dado y acto seguido corregir las coordenadas del otro receptor.
Para entender mejor esta técnica imaginemos que tenemos dos receptores GPS profesionales. Uno de ellos lo estacionamos sobre la roca más alta del Pico de Alba y lo dejamos media hora calculando coordenadas. Mientras tanto, nuestra compañera ha subido con un receptor similar al Aneto y lo ha dejado también calculando coordenadas sobre el recientemente renovado vértice geodésico. Cuando ella compara las coordenadas que acaba de obtener con los valores publicados del vértice se da cuenta de que hay una discrepancia de 28 cm hacia el NE y de -62 cm en cota. Como “sabemos” que el Aneto no se ha movido de sitio y que las coordenadas del vértice son fiables, podemos asumir que en todo el macizo de la Maladeta el error será similar y explotar este conocimiento para corregir las coordenadas del Pico de Alba.
Por ejemplo, este error quizás nos alerta de que, a esa hora y en esa zona, todas las distancias a los satélites se quedan más cortas de lo esperado y será necesario “estirarlas” para que la intersección de esferas ocurra en el punto correcto. Todo esto no es más que una abstracción del concepto de GNSS diferencial, en la práctica las correcciones se llevan a cabo desde programas de ajuste que tienen en cuenta mucha más información, pero en esencia el símil es válido.
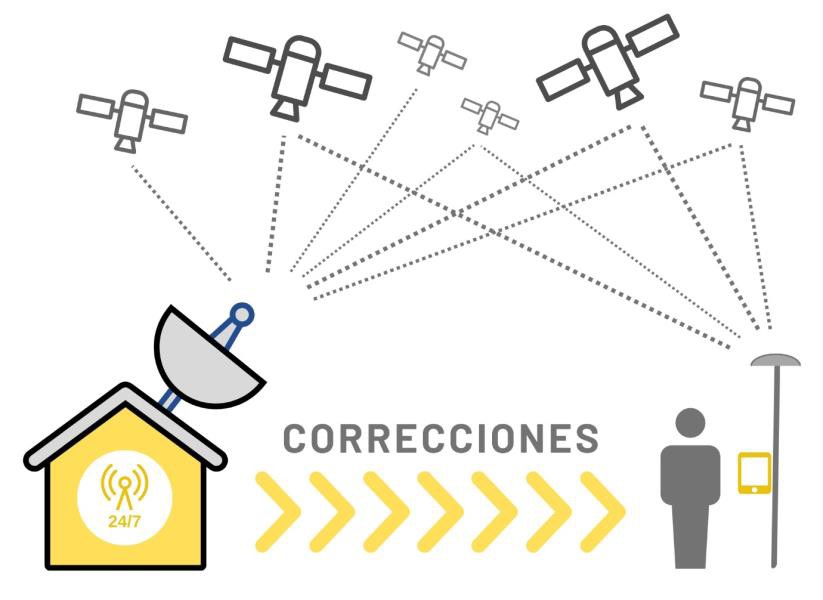 Figura 12. Concepto de GNSS diferencial. La estación permanente (izquierda) envía correcciones al usuario (derecha). Ambos deben observar un mínimo de satélites en común. Fuente: Sostremetries 2023
Figura 12. Concepto de GNSS diferencial. La estación permanente (izquierda) envía correcciones al usuario (derecha). Ambos deben observar un mínimo de satélites en común. Fuente: Sostremetries 2023
Algunas empresas privadas y organismos gubernamentales han ido un paso más allá desplegando una red de estaciones permanentes por todo el territorio con receptores que están constantemente recalculando coordenadas sobre puntos geodésicos muy bien determinados (Figura 12). Esta información la ofrecen a través de internet para que la aproveche cualquier usuario que se encuentre por la zona sin tener que preocuparse ni siquiera de saber qué estación es la más cercana, simplemente se conecta al sistema y recibirá las correcciones que debe aplicar a su receptor. Las correcciones se pueden aplicar en tiempo real o bien a posteriori en la oficina.
La primera opción permite obtener precisiones de algunos centímetros en menos de un minuto (Parareda 2007).
En cambio, con la segunda opción podríamos conseguir un resultado todavía más preciso, pero sobre todo más fiable.
Hoy en día un GPS profesional cuesta varios miles de euros y procesar la información para alcanzar estas precisiones requiere un mínimo de experiencia, especialmente a la hora de interpretar los resultados. Por ejemplo, aunque el receptor nos informe que ha registrado más de 100 observaciones correctamente y con una desviación estándar de 3 mm entre ellas, no tenemos ningún tipo de garantía de que el resultado esté cerca del valor real. Si el usuario no revisa adecuadamente la convergencia de la solución, la altitud podría estar desplazada más de medio metro sin advertencia alguna, teniendo observaciones muy precisas pero un resultado totalmente erróneo.
Utilizar uno de estos receptores permitiría calcular la altitud de la montaña con precisión de pocos centímetros, la “definitiva” desde el punto de vista excursionista, pero es un trabajo demasiado caro. Utilizar receptores profesionales para medir montañas es un lujo que se ha llevado a cabo sólo para un puñado de cumbres, típicamente la más alta de cada cordillera y pocas excepciones más.
Es el sistema que empleamos en el Pico Arnales. Y por esto decíamos que, en realidad, la gran mayoría de las cimas del Pirineo aún no han sido medidas con precisión.
Medir desniveles con precisión milimétrica
Tal y como hemos visto, la tecnología GPS es la que ofrece mayor precisión para medir la altura de un punto determinado. ¿Pero qué sucede si en la cima hay varios puntos de cota muy similar? En ese caso encontrar la ubicación del punto culminante, incluso con el mejor de los receptores, no es tarea fácil y será necesario utilizar un nivel óptico. Este instrumento permite medir rápidamente pequeños desniveles con precisión milimétrica y sin necesidad de cobertura ni señal de ningún satélite.
 Figura 13. Operador mirando a través de un nivel óptico para determinar si la cima que se ve al fondo es más o menos alta que en la que se encuentra. Fuente: Sostremetries 2022
Figura 13. Operador mirando a través de un nivel óptico para determinar si la cima que se ve al fondo es más o menos alta que en la que se encuentra. Fuente: Sostremetries 2022
Un nivel óptico consiste en una mira telescópica montada sobre una plataforma perfectamente horizontal y que únicamente tiene libertad para girar en torno al eje vertical. Vendría a ser como un telescopio que sólo permite ver las estrellas más cercanas al horizonte. Cuando el operador mira a través del visor, por delante del paisaje ve una cruz filar. La línea horizontal de la cruz le permite diferenciar aquellos elementos que quedan por encima de su horizonte de los que quedan por debajo (Figura 14).
 Figura 14. Visor de la mira telescópica. La línea horizontal indica que el mojón de piedras que vemos a lo lejos está más bajo que el horizonte del observador. Fuente: Sostremetries 2021
Figura 14. Visor de la mira telescópica. La línea horizontal indica que el mojón de piedras que vemos a lo lejos está más bajo que el horizonte del observador. Fuente: Sostremetries 2021
Mientras tanto, un segundo operador sostiene una mira reglada (que no es más que una regla muy larga) y va visitando todos aquellos puntos que le parecen visualmente candidatos a ser el culminante. Al apoyar la mira reglada sobre el suelo, el primer operador la busca con su mira telescópica y se fija la marca que coincide con la línea del horizonte. Este valor le indica el desnivel que hay entre el plano horizontal del nivel y el punto del suelo donde se apoya la mira reglada.
 Figura 15. Mira reglada. El operador que observa a través de la mira telescópica deberá fijarse en la marca que coincide con la línea horizontal de la cruz filar. Fuente: Sostremetries 2022
Figura 15. Mira reglada. El operador que observa a través de la mira telescópica deberá fijarse en la marca que coincide con la línea horizontal de la cruz filar. Fuente: Sostremetries 2022
Como el nivel siempre estará más elevado que cualquiera de los puntos visitados, aquel que muestre un desnivel menor será el punto culminante de la montaña y, por lo tanto, el único que habrá que medir con el receptor GPS.
¿El mar como cota cero?
La altitud de las montañas se suele medir respecto del nivel del mar, sobre todo porque es una frontera muy objetiva para nosotros, pero desde un punto de vista técnico es una muy mala elección. La superficie de los mares en calma oscila continuamente debido a la atracción gravitatoria de la Luna, cambios locales en la presión atmosférica, deshielo de los polos, glaciares que dejan de ser un lastre para algunos continentes, etc (NOAA 2023a). De hecho, si el nivel del mar varía a lo largo de los años y queremos ser muy rigurosos, ¿no deberíamos ir actualizando la altitud de todas las montañas del planeta?
Incluso ignorando estos cambios temporales, el nivel medio del mar en algunas zonas de la Tierra está permanentemente 100 metros más “elevado” que en otras debido a que la aceleración de la gravedad terrestre no es uniforme en toda la superficie del globo (Milbert y Smith s.f.). Este concepto se conoce técnicamente con el nombre de geoide, una superficie imaginaria de potencial gravitatorio constante que pretende coincidir, en la medida de lo posible, con la superficie de los mares en calma y que se prolonga por debajo de los continentes.
El geoide permite determinar la altura a la que se encontraría el mar justo debajo de la montaña que deseamos medir. Si imaginamos un mundo ficticio como el de la película Waterworld, en el que los océanos cubren todo y tierra seca ya no existe, el geoide sería muy fácil de visualizar, pero lamentablemente ya no quedarían montañas por escalar.
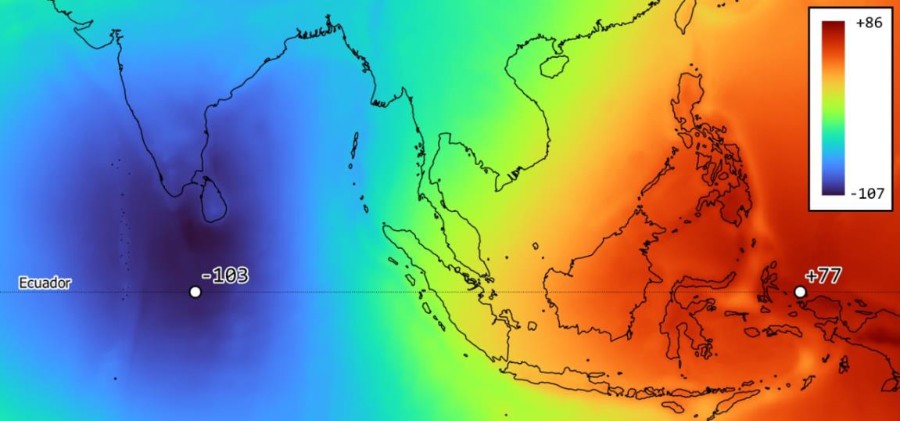 Figura 16. Nivel medio del mar en metros según el modelo EGM08 en el sureste asiático. Fuente: Sostremetries 2023
Figura 16. Nivel medio del mar en metros según el modelo EGM08 en el sureste asiático. Fuente: Sostremetries 2023
La Figura 16 muestra el nivel medio del mar entre el océano Índico e Indonesia según el modelo de geoide EGM08 (Pavlis et al. 2012). Los tonos azules y verdes corresponden a regiones donde el nivel del mar está más cerca del centro de la Tierra de lo que correspondería a esa latitud. En cambio, en las zonas con tonos anaranjados y rojos el mar está más lejos del centro de la Tierra porque la atracción gravitatoria es menor aquí.
Por ejemplo, si nos fijamos en los dos puntos blancos de la Figura 16, vemos que el nivel medio del océano Índico unos 700 km al sur de Sri Lanka, justo sobre la línea del ecuador, está unos 180 metros más cerca del centro de la Tierra que el nivel medio del Pacífico en la costa norte de la isla de Waigeo, en Indonesia, a pesar de que ambos puntos están a la misma latitud. Éste es un caso extremo, pero este tipo de variaciones del nivel medio del mar se dan en todo el planeta y es imprescindible considerarlas para poder calcular altitudes usando receptores GPS. De no hacerlo, en la cima del Aneto nuestro GPS nos indicaría que estamos a unos 3458 metros de altitud, unos 54 metros por encima del valor que debería mostrar.
En la era del posicionamiento vía satélite sería técnicamente más sencillo y sobre todo más preciso medir la altitud de las montañas empezando a contar desde el centro de masas de la Tierra porque los satélites orbitan continuamente alrededor de este punto. De esta manera evitaríamos el problema de un origen que cambia con el tiempo o que depende de si empezamos a contar desde el Mediterráneo o desde el Atlántico.
De hecho, los receptores GPS suelen calcular inicialmente nuestras coordenadas respecto del centro de la Tierra o desde la superficie de un elipsoide de revolución, una esfera ligeramente achatada en los polos que intenta parecerse a la superficie de la Tierra (el radio de la Tierra en los polos es unos 21 km más corto que en el Ecuador (NOAA 2023b)).
Pero en 2023 escalar montañas submarinas todavía no está de moda y preferimos seguir midiendo la altitud de las montañas desde el mar a pesar de las dificultades técnicas y de la inevitable pérdida de precisión. Además, si midiéramos desde el centro de la Tierra, las altitudes dejarían de reflejar fielmente la disminución de presión atmosférica y por lo tanto la capacidad de nuestra sangre para transportar oxígeno.
REFERENCIAS
Aguilar et al. 2013. Accuracy assessment of commercial self-calibrating bundle adjustment routines applied to archival aerial photography. The photogrammetric record. 28(141): 105-108. https://doi.org/10.1111/j.1477-9730.2012.00704.x
[ASPRS] American Society for Photogrammetry and Remote Sensing. 2013. ASPRS accuracy standards for digital geospatial data. Photogrammetric engineering & remote sensing. https://www.asprs.org/a/society/divisions/pad/Accuracy/Draft_ASPRS_Accuracy_Standards_for_Digital_Geospatial_Data_PE&RS.pdf
[CNIG] Centro Nacional de Información Geográfica. 2023. Centro de descargas. Instituto Geográfico Nacional (IGN). Último acceso: 19 de marzo de 2023. http://centrodedescargas.cnig.es/CentroDescargas/index.jsp
DuBois J. 1840. Haute-Savoie, Mont Blanc: ascension par Horace Bénédict de Saussure. Bibliothèque de Genève. Ville de Genève, Genève. Referencia: Icon P 1951-116-6. https://bge-geneve.ch/iconographie/oeuvre/icon-p-1951-116-6
[EC] European Commission. 2016. Galileo goes live! Bruselas. Último acceso: 21 de marzo de 2023. https://ec.europa.eu/commission/presscorner/detail/en/IP_16_4366
Friedt J-M. 2014. Photogrammetric 3D structure reconstruction using Micmac. http://jmfriedt.free.fr/lm_sfm_eng.pdf
Géomètres-Experts de Haute Savoie. 2021. L’evolution de la mesure. 4810 Mesures & demesure. Último acceso: 20 de marzo de 2023. https://4810.eu/la-mesure-2
Gulatee BL. 1954. The height of Mount Everest: a new determination (1952-54). Indian Agricultural Research Institute. Survey of India. Nueva Delhi. https://archive.org/details/Everest_201304
[ICGC] Institut Cartogràfic i Geològic de Catalunya. 2011. Especificacions tècniques de la base topogràfica de Catalunya 1:5000 (BT-5M) v2.0 (pdf). https://datacloud.ide.cat/especificacions/topografia-5000-v2r0-esp-04ca-20110601.pdf
[IGN] Instituto Geográfico Nacional. 2019. Especificaciones técnicas para la realización del vuelo lidar que permita la obtención de datos altimétricos de precisión (pdf). https://pnoa.ign.es/web/portal/pnoa-lidar/especificaciones-tecnicas
[IGN] Instituto Geográfico Nacional. 2021. Especificaciones técnicas para el postproceso de vuelo fotogramétrico digital a 25 cm y 15 cm (PNOA) 2021 (xlsx). https://pnoa.ign.es/resources/archivos/EspTec/211103_Espec_PNOA_POSTPROC_18-22-35%20cm.zip
Isenburg M. 2017. Three videos from full day workshop on LiDAR at IIST Trivandrum in India. Parte 1. Minuto 5:45 - 13:00. https://rapidlasso.com/2018/04/27/three-videos-from-full-day-workshop-on-lidar-at-iist-trivandrum-in-india
Just A. 2019. Aportació del LiDAR en la generació de geoinformació 3D. Observació de la Terra. Conferències a jornades (pdf). Institut Cartogràfic i Geològic de Catalunya (ICGC). Último acceso: 19 de marzo de 2023. https://www.icgc.cat/ca/Innovacio/Publicacions-tecniques/Observacio-de-la-Terra
Kasser M. 2015. Historique des mesures de l’altitude du mont Blanc. Revue XYZ. Association Francophone de Topographie. 145(4): 29-30.
Keay J. 2000. The great arc: the dramatic tale of how India was mapped and Everest was named. First American edition. New York: HarperCollins Publishers.
Kleinsteuber M. 2014. Epipolargeometrie. Einführung in computer vision. Technische Universität München (TUM). Fachgebiet Geometrische Optimierung und Maschinelles Lernen.
Lahiri A. 2016. Radhanath Sikdar and the final phase of measuring Peak XV. Indian J. Hist. Sci. 51.2.1.(2016): 280-288. https://doi.org/10.16943/ijhs/2016/v51i2/48439
Milbert DG, Smith DA. s.f. Converting GPS height into NAVD88 elevation with the GEOID96 geoid height model. National Geodetic Survey. National Oceanic and Atmospheric Administration. Último acceso: 25 de marzo de 2023. https://www.ngs.noaa.gov/PUBS_LIB/gislis96.html
NOAA. 2023a. National Ocean Service. What is glacial isostatic adjustment? National Oceanic and Atmospheric Administration. EEUU. Fecha de última actualización: 20 de enero de 2023. Último acceso: 25 de marzo de 2023. https://oceanservice.noaa.gov/facts/glacial-adjustment.html
NOAA. 2023b. Is the Earth round? National Ocean Service. National Oceanic and Atmospheric Administration. EEUU. Fecha de última actualización: 20 de enero de 2023. Último acceso: 25 de marzo de 2023. https://oceanservice.noaa.gov/facts/earth-round.html
[OGC] Open Geospatial Consortium. c2018. LAS Specification 1.4: OGC community standard. http://www.opengis.net/doc/CS/las/1.4
Parareda C, Soro M, Bosch E, Térmens A. 2007. Un año de experiencias con el servicio RTKAT. https://www.researchgate.net/publication/39119762_Un_ano_de_experiencias_con_el_servicio_RTKAT
Pavlis N, Holmes S, Kenyon S, Factor J. 2012. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. geophys. res. 117(B4): 1-38. https://doi.org/10.1029/2011JB008916
Perosanz F. 2019. GNSS: a revolution for precise geopositioning. Comptes Rendus Physique. 20(3): 171-175. https://doi.org/10.1016/j.crhy.2019.05.018
Pratt JH. 1855. On the attraction of the Himalaya mountains, and the elevated regions beyond them, upon the plumb-line in India. Proceedings of the Royal Society of London. 145: 53. https://doi.org/10.1098/rstl.1855.0002
[CAO] Cabinet Office, Government of Japan. 2023. QZSS Satellite Information. Último acceso: 23 de marzo de 2023. https://qzss.go.jp/en/technical/qzssinfo/index.html
Stegman CE. 1982. The problem of numeracy: Mount Everest shrinks. The American statistician. 36(1): 64. https://doi.org/10.1080/00031305.1982.10482782
[URSC] U R Rao Satellite Center. 2019. IRNSS: Indian Regional Navigation Satellite System. Último acceso: 22 de marzo de 2023. https://www.ursc.gov.in/navigation/irnss.jsp
Van Diggelen F, Enge P. 2014. GPS: an introduction to satellite navigation, with an interactive worldwide laboratory using smartphones. Stanford University. MOOC. https://scpnt.stanford.edu/about/gps-mooc-massive-open-online-course
Walker JT. 1870. Index chart to the Great Trigonometrical Survey of India. Calcutta. https://upload.wikimedia.org/wikipedia/commons/0/00/1870_Index_Chart_to_GTS_India-1.jpg
Xinhua. 2020. China launches last BDS satellite to complete global navigation constellation. Último acceso: 22 de marzo de 2023. http://www.xinhuanet.com/english/2020-06/23/c_139161359.htm





{kind=link}
Deja tu comentario
Sé el primero en comentar este artículo.